About Me
Scuba Diver
I've been scuba diving for four years and logged over 160 dives. I am PADI divemaster, drysuit, EAN, and rescue diver certified. I've dived in more than ten countries and been on three liveaboards. I typically dive in the Monterey, CA area and help guide divers and assist with courses in the area.
RF Engineer
I became interested in RF engineering when I was first employed by a Department of Homeland Security lab working to build millimeter wave radar for airport security. I continued on to work in millimeter wave communications at a startup called Starry. , Apple , and Skydio. Currently, I'm designing and integrating radios for space!
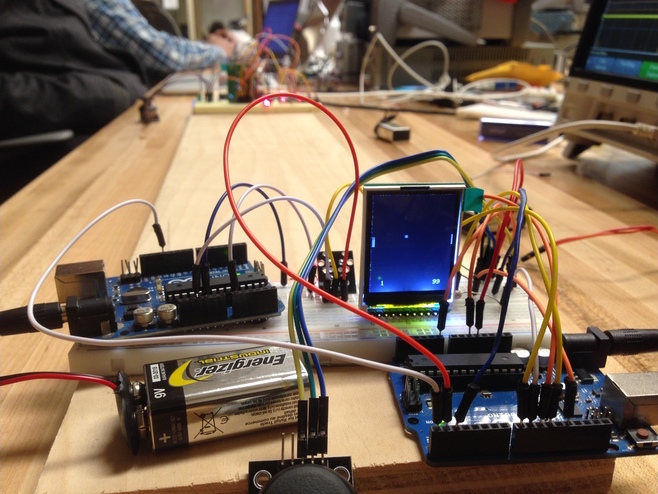
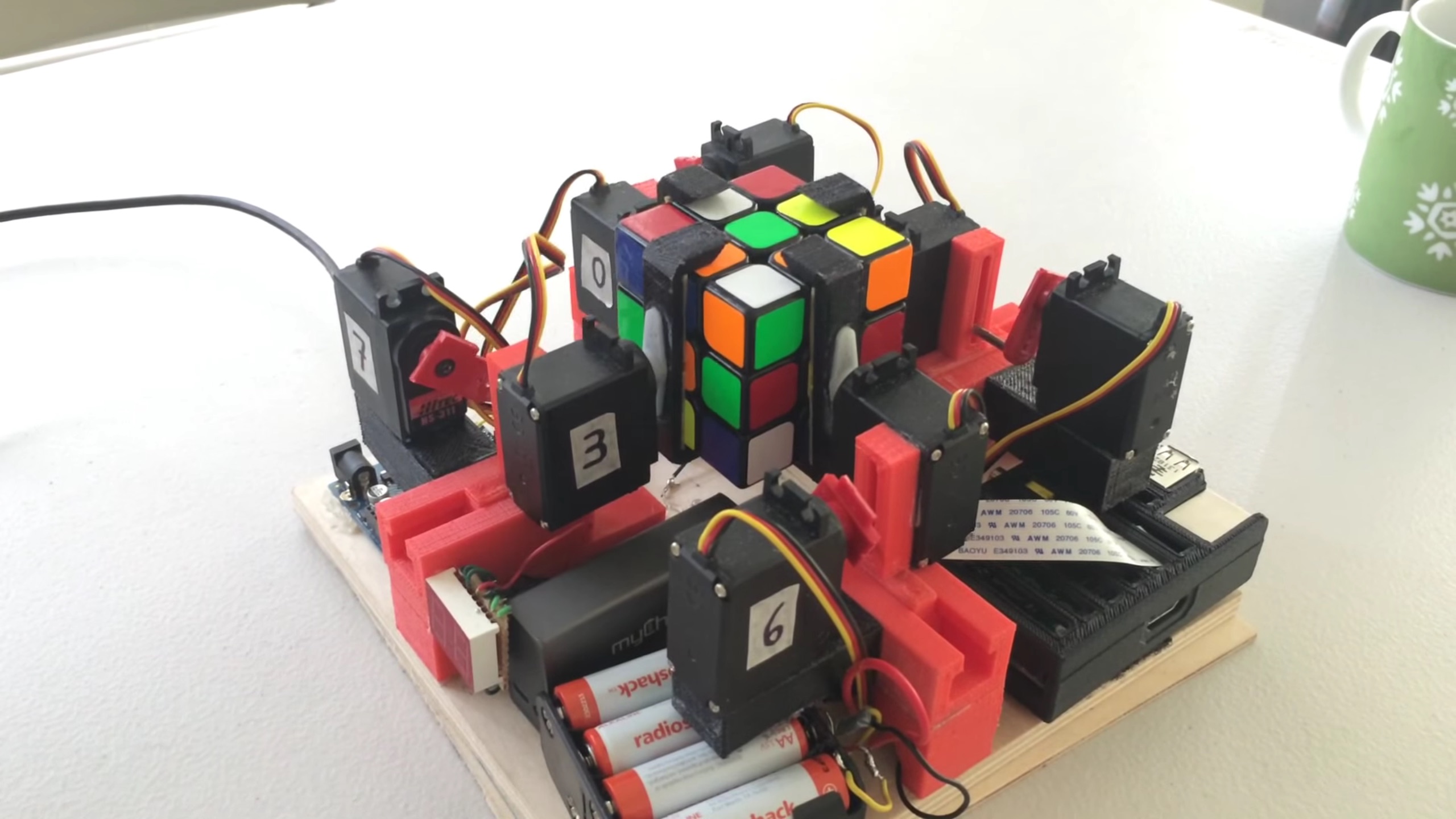
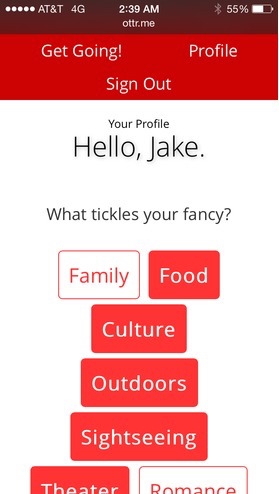
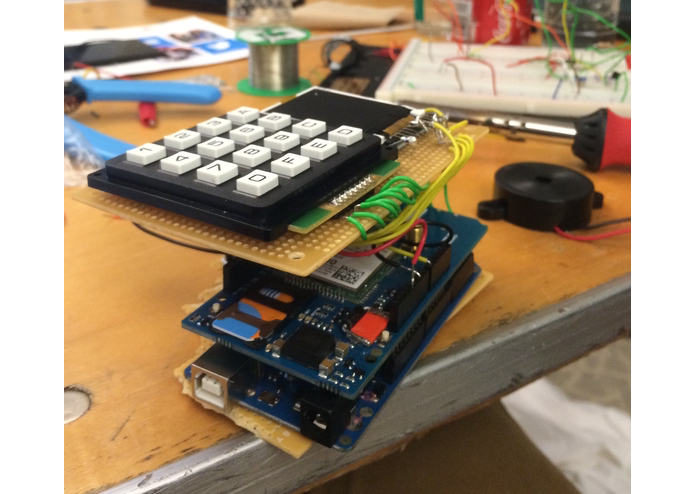
Hacker
I attended my first hackathon as a high school senior in 2014 and was hooked from then on. In the last 6 years, I have attended fifteen hackathons, winning eight awards, including gold medals at BU and UPenn and bronze medals at Columbia and NYU. I am also the co-founder of Northeastern's Hackathon, HuskyHacks. My hackathon projects can be found in my Devpost portfolio. Outside of hackathons, I have also spent free time building UAVs, a plasma speaker, and a high frequency cryptocurrency arbitrage bot. I currently have a dive site mapping website in the works.